

聂海胜则“站在机械臂上”,背景是蓝色的地球,蔚为壮观。
不可或缺的“太空巧手”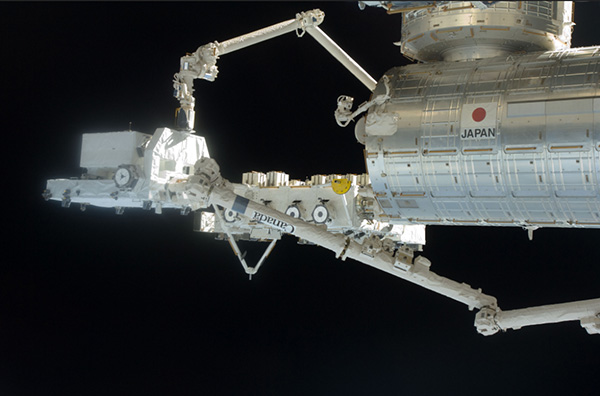
国际空间站上的机械臂。
后面,加拿大又研发了多套空间机械臂,其中,最著名的机械臂就是为国际空间站研制的Canadarm2。该机械臂长17.6米,有7个自由度,总重1.8吨,最大负荷超过116吨,可以自我重定位,具备舱体表面爬行功能(但只能在美国舱段上爬行,因为有些其他国家舱段没有供机械臂爬行的点位)。这里要提一下的是7个自由度活动能力,这是一种仿生的设计,因为我们人从肩到手就是有7个自由度,非常灵活。

国际空间站的机械臂捕获“龙”货运飞船。
世界领先水平的中国机械臂 根据官方公布的信息,该机械臂平时安装在核心舱的小柱段上,主体结构是两根臂杆,展开长度10.2米,重约700千克,其肩部设置了3个关节、肘部设置了1个关节、腕部设置了3个关节,每个关节对应1个自由度,具有7个自由度。通过各个关节的旋转,空间站核心舱机械臂能够实现自身前后左右任意角度与位置的抓取和操作,为航天员顺利开展出舱任务提供强有力的保证。
根据官方公布的信息,该机械臂平时安装在核心舱的小柱段上,主体结构是两根臂杆,展开长度10.2米,重约700千克,其肩部设置了3个关节、肘部设置了1个关节、腕部设置了3个关节,每个关节对应1个自由度,具有7个自由度。通过各个关节的旋转,空间站核心舱机械臂能够实现自身前后左右任意角度与位置的抓取和操作,为航天员顺利开展出舱任务提供强有力的保证。
珠海航展上展示的核心舱和机械臂。
为扩大任务触及范围,该机械臂还具备爬行功能。由于核心舱机械臂采用了“肩3+肘1+腕3”的关节配置方案,肩部和腕部关节配置相同,意味着机械臂两端活动功能是一样的。机械臂通过末端执行器与目标适配器对接与分离,同时配合各关节的联合运动,从而实现在舱体上的爬行转移。 除了支持航天员出舱活动外,机械臂在后续任务中还将承担舱段转位、悬停飞行器捕获和辅助对接、舱外货物搬运、空间环境试验平台照料等重要任务。该机械臂还可以从10米扩展到15米,把小臂和大臂组合在一起,形成一个更长的组合臂。机械臂设计寿命15年、负载能力25吨、末端定位精度45毫米,可实现大范围、大负载操作以及局部精细化操作。此外,机械臂以后还可以扩展到实验舱Ⅰ、实验舱Ⅱ,还有光学舱,这些舱都可以进行舱外机械臂支持航天员开展的一些作业。
除了支持航天员出舱活动外,机械臂在后续任务中还将承担舱段转位、悬停飞行器捕获和辅助对接、舱外货物搬运、空间环境试验平台照料等重要任务。该机械臂还可以从10米扩展到15米,把小臂和大臂组合在一起,形成一个更长的组合臂。机械臂设计寿命15年、负载能力25吨、末端定位精度45毫米,可实现大范围、大负载操作以及局部精细化操作。此外,机械臂以后还可以扩展到实验舱Ⅰ、实验舱Ⅱ,还有光学舱,这些舱都可以进行舱外机械臂支持航天员开展的一些作业。| 欢迎光临 小木猫 (https://woodenkitten.com/) | Powered by Discuz! X3.2 |